- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Статија за да се разбере разликата помеѓу чекорните мотори и серво-моторите и серво моторите
I. Разлики помеѓу степер мотори и серво и серво мотори
Степер мотор: е електричен импулсен сигнал во аголно поместување или поместување на линијата на деловите на чекорот на контролниот елемент со отворен циклус. Едноставно кажано, тој се потпира на електричниот пулсен сигнал за да го контролира аголот и бројот на вртења. Така, тој се потпира само на пулсниот сигнал за да одреди колкава ротација. Бидејќи нема сензор, аголот на запирање може да отстапи. Сепак, прецизниот импулсен сигнал го минимизира отстапувањето.
Серво мотор: потпирајте се на серво контролното коло за да ја контролирате брзината на моторот, преку сензорот за да ја контролирате положбата на ротација. Значи, контролата на позицијата е многу прецизна. И брзината на ротација е исто така променлива.
Серво (електронски серво): Главната компонента на сервото е серво моторот. Содржи контролно коло на серво мотор + комплет за редуктор. О, да, серво моторот нема комплет за редуктор. И сервото има комплет за редуктор.
Во случај на гранично серво, тој се потпира на потенциометар под излезното вратило за да го одреди аголот на управување на рачката на кормилото. Контролата на серво сигналот е сигнал со модулиран ширина на пулсот (PWM), каде што микроконтролерот лесно може да го генерира овој сигнал.
II. Основен принцип на чекорен мотор
Како функционира:
Нормално, роторот на моторот е постојан магнет, и кога струјата тече низ намотките на статорот, намотките на статорот произведуваат векторско магнетно поле. Ова магнетно поле ќе го поттикне роторот да ротира под агол, така што насоката на парот магнетни полиња на роторот ќе биде иста како и насоката на магнетното поле на статорот. Кога векторското магнетно поле на статорот ротира под агол. Роторот исто така ротира под агол со ова магнетно поле. За секој влезен електричен импулс, моторот ротира еден аголен чекор напред. Неговото излезно аголно поместување е пропорционално на бројот на влезните импулси, а неговата ротациона брзина е пропорционална на фреквенцијата на импулсите. Со менување на редоследот по кој намотките се напојуваат, моторот се враќа назад. Затоа, бројот и фреквенцијата на импулсите и редоследот на напојување на намотките на секоја фаза од моторот може да се контролираат за да се контролира ротацијата на чекорниот мотор.
Принцип на производство на топлина:
Обично се гледаат сите видови на мотори, внатрешни се железното јадро и калем за ликвидација. Отпорот на ликвидација, моќта ќе произведе загуба, големината на загубата и отпорот и струјата е пропорционална на квадратот, што често се нарекува загуба на бакар, ако струјата не е стандарден DC или синусен бран, исто така ќе произведе хармонична загуба; јадрото има вртложен ефект на хистереза, во наизменичното магнетно поле, исто така, ќе произведе загуба, големината на материјалот, струјата, фреквенцијата, напонот поврзан, што се нарекува загуба на железо. Губењето на бакар и загубата на железо ќе се манифестираат во форма на генерирање топлина, што ќе влијае на ефикасноста на моторот. Чекорниот мотор генерално ја следи прецизноста на позиционирањето и излезниот вртежен момент, ефикасноста е релативно мала, струјата е генерално поголема, а хармоничните компоненти се високи, фреквенцијата на струјата наизменично со брзината и промената, така што чекорните мотори генерално имаат топлинска ситуација и ситуацијата е посериозна од општиот мотор со наизменична струја.
III. Конструкција на кормило
Сервото главно се состои од куќиште, плочка, погонски мотор, редуктор на менувачот и елемент за откривање позиција. Нејзиниот принцип на работа е дека ресиверот испраќа сигнал до сервото, а IC на таблата на колото го придвижува моторот без јадро да почне да ротира, а моќта се пренесува на замавната рака преку редукторот, а во исто време, детекторот за позиција испраќа сигнал назад за да утврди дали пристигнал на позиционирањето или не. Детекторот за позиција е всушност променлив отпорник. Кога сервото се ротира, вредноста на отпорникот соодветно ќе се промени, а аголот на ротација може да се знае со откривање на вредноста на отпорот. Генералниот серво мотор е тенка бакарна жица обвиткана околу триполен ротор, кога струјата тече низ серпентина ќе генерира магнетно поле, а периферијата на магнетот на роторот ќе произведе одбивност, што пак генерира сила на ротација. Според физиката, моментот на инерција на објектот е директно пропорционален на неговата маса, така што колку е поголема масата на предметот што треба да се ротира, толку е поголема потребната сила. Со цел да се постигне брза брзина на ротација и мала потрошувачка на енергија, сервото е направено од тенки бакарни жици извртени во многу тенок шуплив цилиндар, формирајќи многу лесен шуплив ротор без столбови, а магнетите се поставени во внатрешноста на цилиндерот, кој е моторот на шупливата чаша.
Со цел да одговараат на различни работни средини, постојат сервои со водоотпорни и отпорни на прав дизајни; и како одговор на различните барања за оптоварување, постојат пластични и метални запчаници за серво, а металните запчаници за серво се генерално со висок вртежен момент и со голема брзина, со предност што запчаниците нема да се откопуваат поради прекумерни оптоварувања. Сервосите од повисок степен ќе бидат опремени со топчести лежишта за да се направи ротацијата побрзо и попрецизно. Има разлика помеѓу еден топчест лежишта и два топчести лежишта, секако дека двата топчести лежишта се подобри. Новите сервоси FET главно користат FET (Транзистор со ефект на поле), кој има предност на низок внатрешен отпор и затоа помала загуба на струја од нормалните транзистори.
IV. Серво принцип на работа
Од бранот pwm во внатрешното коло за да се генерира пристрасност на напон, контактор генератор преку намалување на опрема за возење на потенциометар да се движи, така што кога разликата на напонот е нула, моторот запира, за да се постигне ефектот на серво.
Протоколите за серво PWM се сите исти, но најновите сервоси што се појавуваат може да бидат различни.
Протоколот е генерално: високо ниво на ширина во 0,5ms ~ 2,5ms за контрола на сервото да се врти низ различни агли.
V. Како работат серво моторите
На сликата подолу е прикажано коло за контрола на серво моторот направено со моќен оперативен засилувач LM675, а моторот е серво мотор со еднонасочна струја. Како што може да се види од сликата, оперативниот засилувач за напојување LM675 се напојува со 15V, а напонот од 15V се додава на влезот во фаза на оперативниот засилувач LM675 преку RP 1, а излезниот напон на LM675 се додава на влезот на серво моторот. Моторот е опремен со генератор на сигнал за мерење на брзината за откривање на брзината на моторот во реално време. Всушност, генераторот на сигнал за брзина е еден вид генератор, а неговиот излезен напон е пропорционален на брзината на ротација. Излезот на напонот од генераторот на сигналот за мерење на брзината G се враќа на инвертирачкиот влез на операциониот засилувач како сигнал за грешка на брзината по колото на делител на напон. Вредноста на напонот поставена со командниот потенциометар за брзина RP1 се додава на влезот во фаза на операциониот засилувач по поделбата на напонот со R1.R2, што е еквивалентно на референтниот напон.
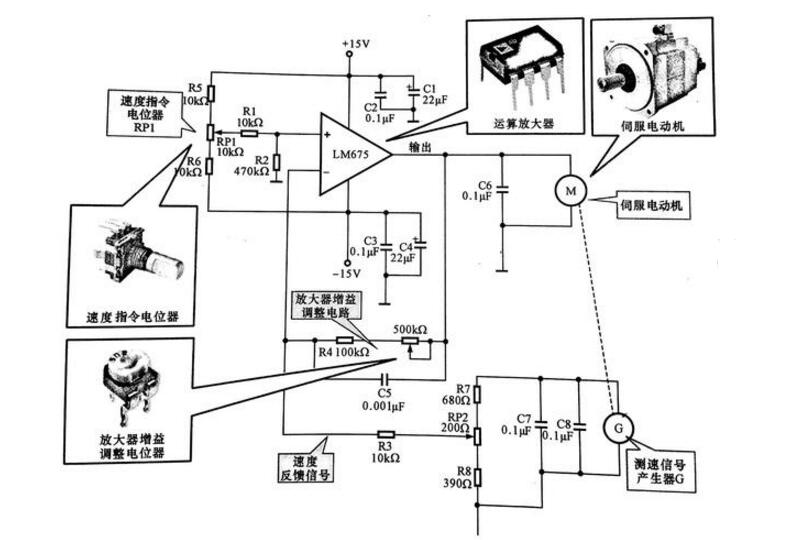
Контролна шема на серво мотор
Сервомотор: означено со буквата М за сервомотор, тој е извор на енергија за погонскиот систем. Оперативен засилувач: означен со името на колото, т.е., LM675, е парче засилувач во серво контролното коло кое обезбедува погонска струја за серво моторот.
Команден потенциометар за брзина RP1: Го поставува референтниот напон на операциониот засилувач во колото, т.е. подесување на брзината. Потенциометар за прилагодување на засилувањето на засилувачот RP2: Се користи во колото за фино прилагодување на засилувањето на засилувачот и големината на сигналот за повратна информација за брзината, соодветно.
Кога се менува оптоварувањето на моторот, се менува и напонот што се враќа на превртениот влез на операциониот засилувач, т.е. кога оптоварувањето на моторот се зголемува, брзината се намалува, а излезниот напон на генераторот на сигнал за брзина исто така се намалува, така што напонот на превртениот влез на операциската разлика, напонот и засилувачот се намалува. се зголемува, а излезниот напон на операциониот засилувач се зголемува. Спротивно на тоа, кога оптоварувањето станува помало и брзината на моторот се зголемува, излезниот напон на генераторот на сигналот за мерење на брзината се зголемува, напонот за повратна врска додаден на превртениот влез на операциониот засилувач се зголемува, разликата помеѓу овој напон и референтниот напон се намалува, излезниот напон на моторот се намалува и брзината на моторот се намалува соодветно. ротационата брзина може автоматски да се стабилизира на поставената вредност.